自動運転とテクノロジー
目次
1 はじめに
皆様、こんにちは。今年も残り数日となりましたが、振り返ってみていかがでしょうか。私は今年車を買いました。
そんな自動車について、来年4月から自動運転レベル4が解禁されることがニュースになっていました。
今回のコラムでは、自動運転について、用いられている技術の観点から見ていこうと思います。
2 現状の自動運転について
本題に入る前に、現状の自動運転について触れたいと思います。
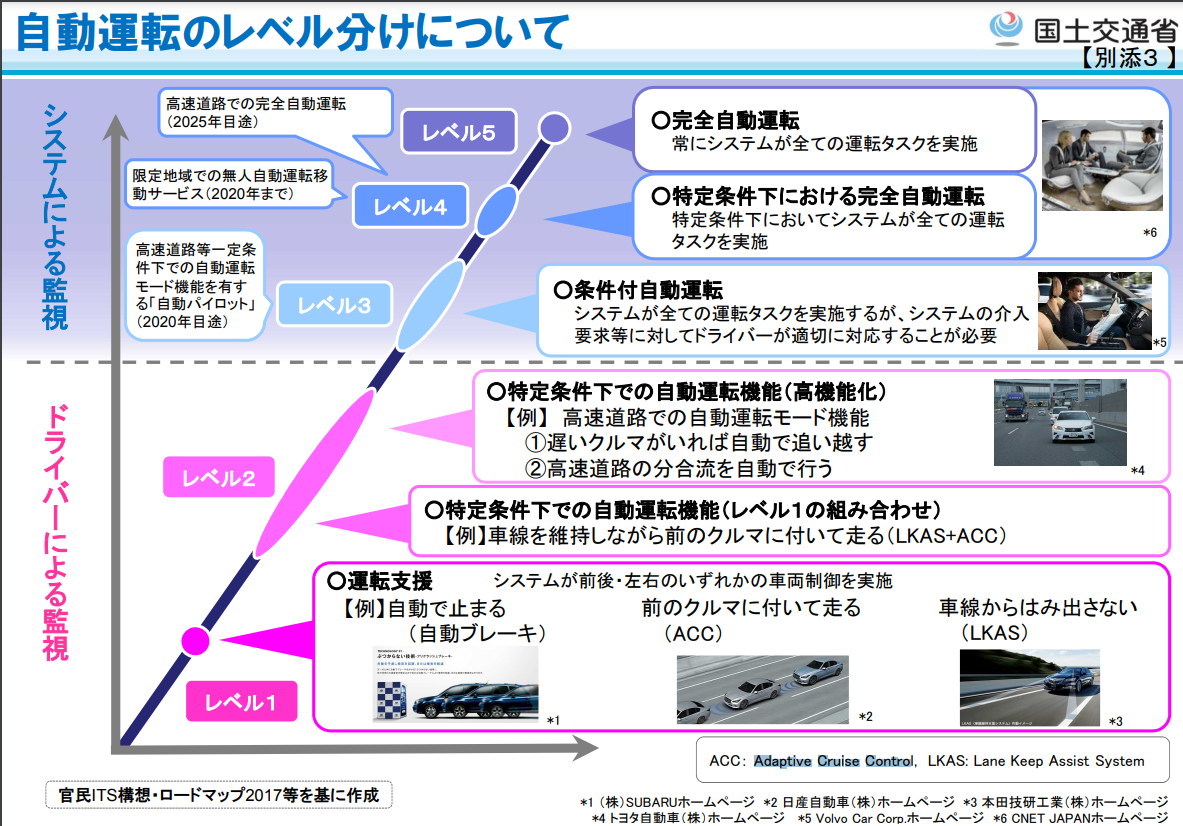
2-1 自動運転のレベル
自動運転は、運転の主体や自動運転の技術到達度、走行可能エリアなどの観点から、国土交通省の定める「自動運転の定義及び政府目標」によって、5段階にレベル分けされています。
 出所:
出所:
2022年12月現在では、レベル3(条件付き自動運転)の機能を搭載した市販車の販売はすでに始まっており、2023年4月からはレベル4(特定条件下における完全自動運転)が解禁されることが発表されています。
レベル3とレベル4の大きな違いはドライバーを必要とするかです。
レベル3では緊急の場合、ドライバーに操作が移りますが、レベル4では緊急時を含め、動き出して止まるまでの全ての操作を車が行います。(以後本コラムではレベル4以上の自動運転を「完全自動運転」と呼びます)
余談ですが、自動運転の法整備が最も進んでいるドイツでは、2021年の7月からレベル4が認められており、日本は約1年9か月遅れでこれに追いつく形になります。
2-2 これまでの自動運転の代表的な機能
ここでは3つの機能をご紹介します
AEBS(Advanced Emergency Braking System)
AEBSはわかりやすく言い換えると、自動ブレーキ(衝突被害軽減ブレーキ)のことです。
カメラやレーダーで先行車や障害物を検知し、衝突の危険が高まった場合は自動的にブレーキが作動し、被害軽減を図ります。
新型の国産車については2021年11月より、自動ブレーキの搭載が義務付けられています。
ACC(Adaptive Cruise Control)、CACC(Cooperative Adaptive Cruise Control)
ACCは車間距離制御装置と呼ばれ、車両の前方に搭載したレーダーを用いて、前方を走行する車両との車間距離を一定に保つ機能です。
CACCはACCに加えて車間通信に よって他車の加減速情報を共有することで、ACCより短い車間距離での走行や、制御の遅れによるハンチング(車間の変動)の少ない安定した走行を可能とする機能です。
LKAS(Lane Keep Assist System)
LKASは車線維持支援システムと呼ばれ、カメラによって車線(実線、破線)を検知し、車が車線をはみ出しそうになると、ステアリング振動の警告で注意を促すとともに、車線中央付近へ戻すようにステアリング操作を支援する機能です。
3 完全自動運転に必要な技術
前章で紹介したように、レベル4が解禁されるとドライバーなしの完全自動運転が実現されることになります。
本章では完全自動運転に必要なステップを画像のように「認知」、「判断」、「操作」の3つに分けてご紹介します。
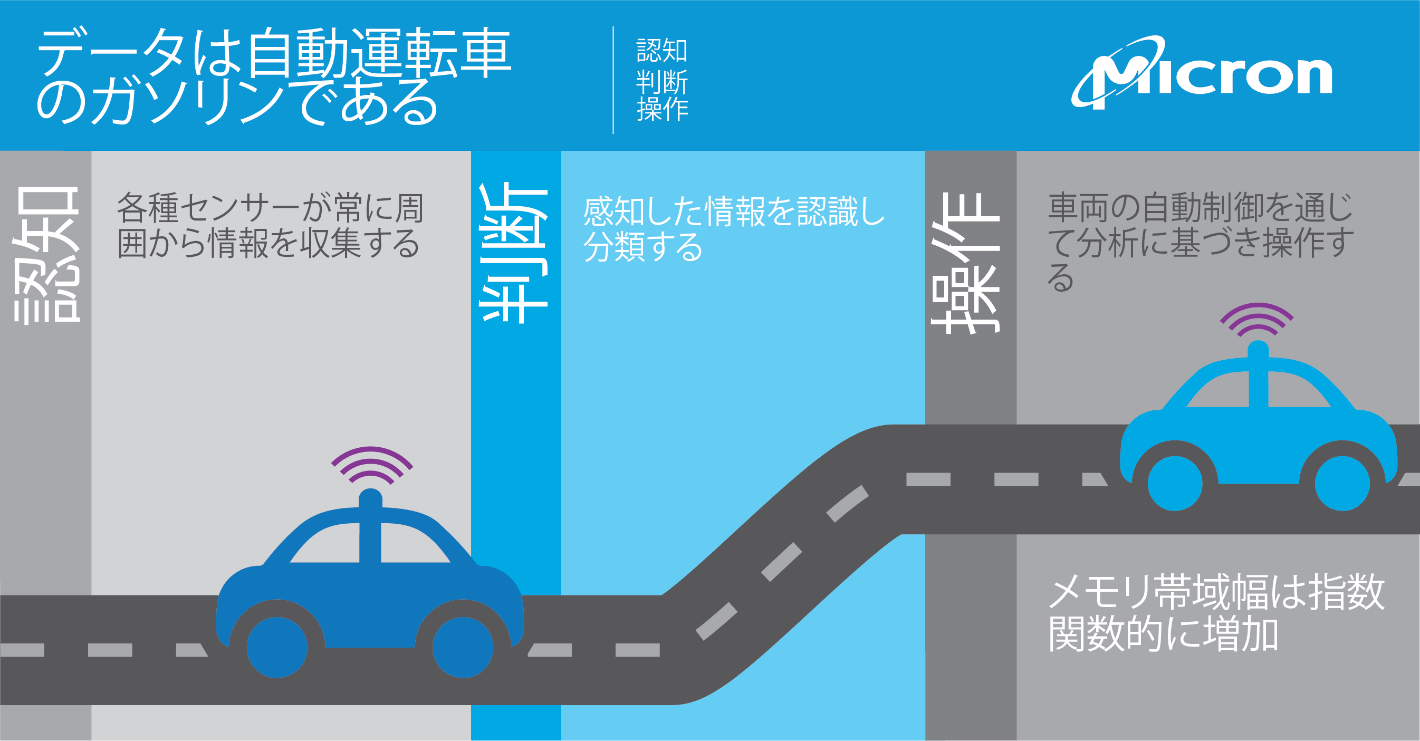 出所:完全自動化への道:自動運転車はAIと画期的なメモリに依存することになる
出所:完全自動化への道:自動運転車はAIと画期的なメモリに依存することになる
3-1 認知
自動運転にはまず周りがどういう状況か把握する必要があります。
画像認識は、画像や動画のなかに“見逃せない”特徴を見出し、「それが何か?」を認識する技術です。
画像認識の仕組みは簡単に言えば、まず対象物の特徴を特定し、それに似たものを照らし合わせ、正解を導きます(これを「パターン認識」と呼びます)。
これにより、車はとらえた画像から対向車を車として、歩行者を人として、標識を標識として認識することができるのです。
3-2 判断
周囲の状況が認識出来たら、次はその状況がどのように変化するかを予測し、その状況に合わせて自身がどう行動すべきかを判断する必要があります。
ここではAI(人工知能)の技術が用いられ、言わば自動運転における「脳」の役割を果たします。
AIにより「念のため速度を抑える」「可能であれば車線上のやや右寄り(左寄り)を走行する」など、人間同様にその時々のシチュエーションに応じた判断が下されます。
3-3 操作
最後にAIが下した判断に従ってステアリングやアクセスを制御します。
AIの判断は電気信号に変更後、機械的な動作に変えるアクチュエータに送り、自動車の制御につなげていきます。
この際、ステアリングやアクセルペダルなどの操作の影響を最善化するバイ・ワイヤ技術も必要になります。
4 より安全な完全自動運転を可能にするための最新技術
より安全な完全自動運転を実現するため、多くの技術が用いられています。ここではその中から3つ紹介します
4-1 LiDAR(Light Detection And Ranging)とミリ波レーダー
 出所:CORNES Technologies 【Webマガジン Vol.46- October., 2021】Column:【解剖】LiDARの技術
出所:CORNES Technologies 【Webマガジン Vol.46- October., 2021】Column:【解剖】LiDARの技術
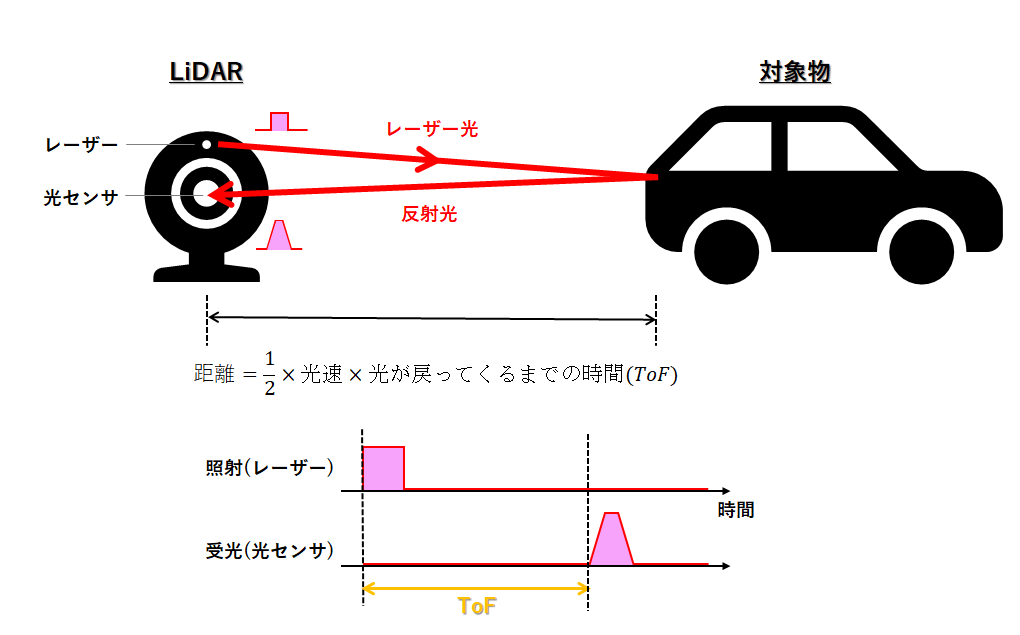
カメラだけでは検知しにくい物体との距離を測定するための技術がLiDARやミリ波レーダーです。
LiDARは近赤外光や可視光、紫外線を使って対象物に光を照射し、その反射光を光センサーでとらえ、返ってくるまでの時差から距離を測定する技術です。
また、ミリ波レーダーは光でなく電波を用いて測定を行います。
これらを用いることで、悪天候や暗闇の中でも、より正確に物体との距離を測定することができるのです。
4-2 クラウドとエッジコンピューティング
 出所:日経クロステック「盛り上がるエッジコンピューティング、トヨタが開発に着手」
出所:日経クロステック「盛り上がるエッジコンピューティング、トヨタが開発に着手」
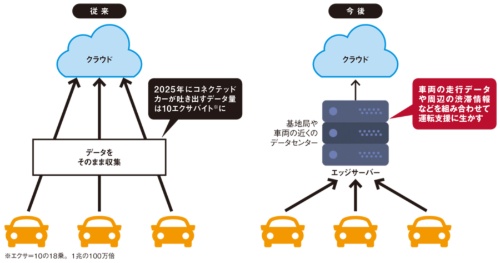
自動運転を実現するには、個別の一台一台が周囲の環境を直接認識するだけでなく、より広範囲のエリアから情報を取得した上で運転の判断を行う必要があります。
それぞれの車がいわば高性能なセンサーとなって周囲のあらゆる情報を収集し、それをクラウドに集積、他の車とも情報を共有し合って相互活用することで、自動運転の精度は飛躍的に高まると言われています。
この場合に懸念されるのが、データ量の多さに起因する遅延です。
たとえ100分の1秒遅延しただけでも、通信の遅れが交通事故などの重大なインシデントにつながる可能性も考えられます。
そこで用いられるのがエッジコンピューティングです。
エッジコンピューティングでは、全てのデータをクラウドに送信するのではなく、車の近くに設置されたエッジサーバーがデータの処理を担当し、加工済みのデータのみをクラウドに送信します。
そうすることで、クラウドへの通信量が大幅に少なくなり、通信の遅延を軽減することができます。
4-3 ディープラーニング
 出所:@IT 「ディープニューラルネットワーク(DNN:Deep Neural Network)とは?」
出所:@IT 「ディープニューラルネットワーク(DNN:Deep Neural Network)とは?」
自動運転では画像認知や、それを基にした予測、判断を行うのにAIが用いられています。
そのAIの精度を格段に上げる技術がディープラーニング(深層学習)です。
従来の機械学習では、開発者が学習の条件(何に注目して学習するか)を教えて学習を行います。
ディープラーニングでは、ニューラルネットワーク(NN)(※1)を多層化したディープニューラルネットワーク(DNN)を用いることで、大量のデータをもとにAI自らが各データの特徴を分析して学習を行っていきます。
例えば、リンゴとミカンを区別するAIを作成する場合、従来の機械学習では色、大きさのみを設定し、学習を行っていたのに対し、ディープラーニングではAIがその他の形、匂い、味などの特徴を見出して学習することで、より精度の高い判断を行えるようになるのです。
(※1)ニューラルネットワークは、脳機能に見られるいくつかの特性を計算機上のシミュレーションによって表現することを目指した数学モデルのこと。
5 さいごに
自動運転は、画像認識、クラウド、AIなど、多くの技術を用いることで、自動運転はより安全で快適なものになっていくでしょう。
また、これらの技術は自動運転の分野だけでなく、身近な日々の業務を改善や、新しいサービスに活用することもできます。
弊社でもAIやクラウドを用いた開発実績がございますので、少しでも興味のあるものがございましたら、是非こちらまでお問い合わせください。
関連記事


最新情報をお届けします!
RPAに関する最新コラムやイベント情報をメールで配信中です。
RPA領域でお仕事されている方に役立つナレッジになりますので、ぜび登録してください!






- November 2024 (2)
- October 2024 (3)
- September 2024 (2)
- August 2024 (4)
- July 2024 (1)
- June 2024 (2)
- May 2024 (3)
- April 2024 (1)
- March 2024 (1)
- February 2024 (1)
- January 2024 (1)
- December 2023 (1)